

Le projet

La carte AutonomUS, développée par MAV AutoPilot
Le projet MAV AutoPilot a pour mission de réaliser un contrôleur « pilote automatique » pour un avion miniature. Le but du système autopilote est de rendre l'avion capable de suivre une trajectoire préétablie de façon autonome tout en pouvant suivre la progression de l'engin miniature à l'aide d'une interface usager (contenant les données de vol, le plan de vol, le suivi en temps réel à l'aide d'un GPS, etc.), située au sol.
Nous travaillons en collaboration avec notre client, le groupe technique VAMUdeS (Véhicule Aérien Miniature de l'Université de Sherbrooke), développant des avions miniatures en vue de participer à différentes compétitions un peu partout dans le monde. Notre finalité est de permettre à VAMUdeS d'utiliser son propre autopilote, et ainsi améliorer ses performances en compétition.
Pour ce faire, notre solution est composée de trois éléments principaux: une base terrestre, un système central embarqué à bord de l'avion (la carte AutonomUS) ainsi qu'un logiciel embarqué.
Situation actuelle
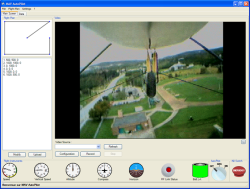
L'interface utilisateur de la base terrestre
Suite à un besoin manifesté par VAMUdeS, le projet MAV AutoPilot a débuté en janvier 2006 avec l'équipe MAV2006. Durant cette année, une douzaine d'étudiants en génie électrique et génie informatique avaient comme mission de mettre à terme la conception de l'autopilote. N'ayant pas terminé à la fin de l'année 2006, maintes améliorations potentielles ont été relevées à la fin de leur mandat.
Une nouvelle équipe de huit personnes (MAV2007) a donc été chargée de prendre la relève du projet (janvier 2007) en vue de le compléter, en plus d'en améliorer les performances par l'ajout de fonctionnalités, tout en prenant en considération les besoin évolutifs de VAMUdeS.
Objectifs pour l'année 2007

Présentation publique du 10 février 2007
Les principaux objectifs de l'équipe MAV2007 ont été définis en fonction des besoins de notre client. Dans un premier temps, nous ferons de nouvelles révisions du PCB de la carte AutonomUS en vue de corriger des erreurs de conception et préparer la carte à accueillir de nouvelles fonctionnalités, qui seront ajoutées aucours de l'année 2007. Nous devons également concevoir un système alternatif aux gyroscopes en vue de garantir une stabilité du contrôle de l'aéronef par le système de pilote automatique. Une autre partie majeure qui sera réalisée par l'équipe consistera à supprimer les contraintes de positionnement spatial dans le but d'améliorer la portée à laquelle l'avion miniature pourra être piloté.
Parmi les nouvelles fonctionnalités qui seront développées en 2007, mentionnons l'ajout d'une caméra asservie sur l'avion qui pourra être contrôlée à distance. De plus, nous planifions ajouter du force feedback sur le joystick de contrôle de la base terrestre et également ajouter un grand nombre de données de vol sur l'interface usager: ces nouvelles fonctionnalités seront profitables notamment au pilote lorsqu'il utilise le système en mode manuel. Finalement, nous ajouterons un lien CAN bus sur la carte AutonomUS en vue d'augmenter le nombre d'entrées/sorties.
Enfin, nous désirons être présents lors de compétitions de véhicules aériens miniatures afin de faire connaître MAV AutoPilot à la communauté de compétition de véhicules aériens miniatures.