

The Project

The AutonomUS board, developed by MAV AutoPilot
The MAV AutoPilot project mission is to develop an autopilot system for Micro Aerial Vehicles (MAV). Our main goal is to make the aircraft capable of following a predefined path by itself while being able to monitor the miniature vehicle progression using a graphical user interface (containing the flight data, theflight plan, the actual aircraft position given by GPS, etc.), located at the ground station.
Our group works in collaboration with our client, the VAMUdeS (Véhicule Aérien Miniature de l'Université de Sherbrooke) group, which develops miniature aircrafts in order to take part to various competitions around the world. Our purpose is to allow VAMUdeS to use its own autopilot system, and thus improve its performance during competitions.
In order to make it happen, our solution is made up of three important parts: the ground station, the central embedded system located within the aircraft (the AutonomUS board) and the embedded software.
Current Progress
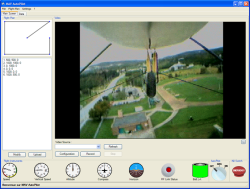
Ground station graphical user interface
Following a request made by the VAMUdeS group, the MAV AutoPilot project was started in January 2006 by the MAV2006 team. During the year, an average of twelve undergraduates in both computer and electrical engineering were asked to complete the design of the autopilot system. While they did not fully accomplish this by December 2006, the team noted down a list of potential features that could be useful for the future of the project.
A brand-new team of 8 members (MAV2007) has been mandated to take over the project (January 2007). As requested by the VAMUdeS team, they will be asked to increase the performance of the autopilot system by adding a number of new features.
Objectives for 2007

February 10, 2007 public presentation
The objectives of the MAV2007 team were defined according to the needs of our client. First, we need to build a new PCB of the AutonomUS board in order to fix some design errors, in addition to preparing the prototype board to host the new features that will be added this year. We also have to design an alternative gyroscope system to ensure the stability of the aircraft as it is being controlled by our autopilot system.
Another major objective that will be achieved by our team will be to increase the range in which the miniature aircraft can be flown. Among all new features that will be developed this year, we ought to mention the camera control module that will be present on the aircraft. This will allow the ground station team to remotely control the camera position. We also plan to add the force feedback feature on the joystick of the ground station, and increase the amount of useful flight data displayed on the graphical user interface. These new features will be beneficial in particular to the pilot when he is flying in manual mode. We also aim to implement the CAN bus protocol on the AutonomUS board in order to increase the amount of I/O.
Finally, we hope to take part in future Micro Aerial Vehicles competitions in order to gain exposure for the MAV AutoPilot project within the MAV community.